六维力传感器的每个力对应一个矢量,它们既有大小又有方向。其校准是假设传感器系统是线性系统,即传感器静态数学模型F=CVV其6路原始输出信息(列信息,单位为V),F6路力信息(列信息,力单位为KN,扭矩单位是KNm)。
使用六维力传感器上的广义力矢量组F和通过数据采集和采样获得的六个传感器输出信号矢量组V来识别校准矩阵C,传感器的输出信号是由6路电压信号组成的矢量。在不考虑传感器非线性因素的影响下,只需向传感器施加6个线性无关的力矢量,并测量输出电压信号矢量V,你可以得到一个解决方案C。
六维力传感器属于力感传感器。力感传感器是一种广泛应用于机器人和机电一体化设备中的触觉传感器。力和扭矩传感器用于检测设备的内力或与外部环境相互作用的力。力的物理量不能直接测量,可以通过其他物理量间接测量。

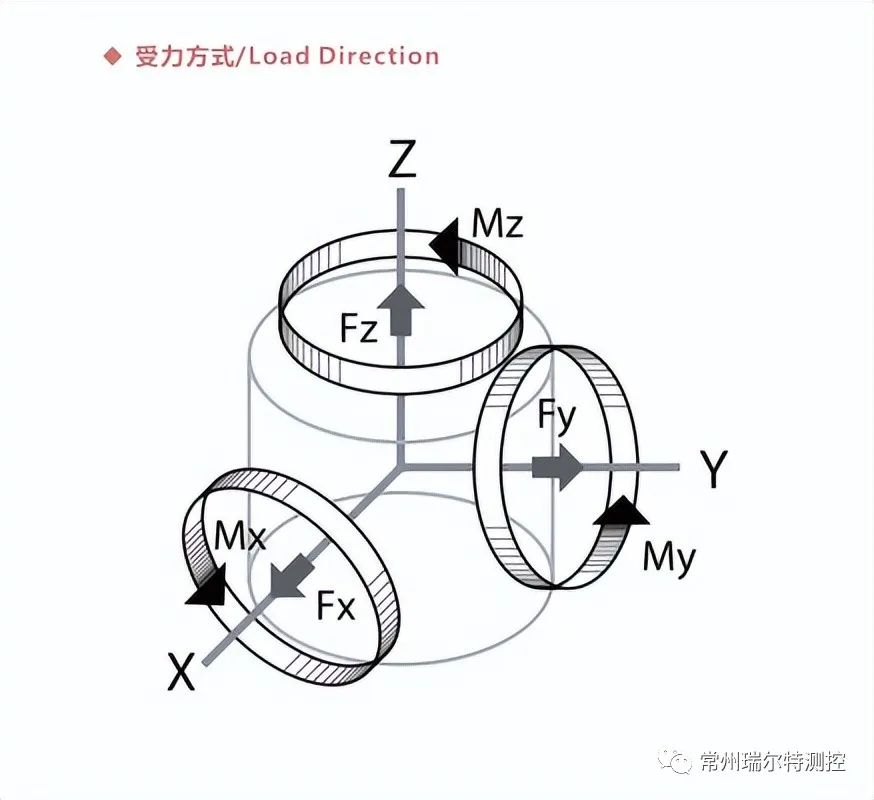
广义上,六维力传感器可以检查空间任意力系中的三维正交力(fx,fy,fz)三维正交力矩(mx,my,mz),由于测量丰富,测量精度高。主要用于力和力-位控制场合,如力控精密装配、力控精密抛光、机器人拖动教学、碰撞测试等。
“气动力—惯性力复合离心试验”六维力传感器标定系统由测试系统和标定装置两部分组成,测试系统主要包括力传感器,信号测量及放大装置,数据采集卡,计算机以及标定软件;传感器标定装置由六维力承力墙、承力钢梁、过渡法兰、L型加载梁,液压协调加载系统等组成。其中承力墙、过渡法兰、承力钢梁主要用于传感器和液压作动筒的转接和固定,液压协调加载系统是载荷施加和控制装置。
作为标定装置的核心部件—型加载梁:其设计精巧,简单实用,确保力传递的连续型和准确性。其8个45°均布的安装螺孔,使L型加载梁的安装位置45°可调,从而使xF和yF载荷的施加可以实现,L型的外形设计,使该加载装置不仅可以实现单唯力的施加,而且可以根据需要完成不同方向和大小的力矩和单唯力的同时施加,这种装置从结构设计上满足了六维力传感器标定所需所用载荷状态的实现;后,L型加载梁周身所布置的8个半球状加载坑,以点一点接触的方式确保了载荷施加方向的准确性。