产品介绍
特点
● UART输出(I2C可选)
● 低功耗
● 紧凑的封装
● 定制带宽(可选)
● 快速启动
● 完全独立
● 角速率输出
● 偏航输出
应用
● 机器人导航
● 平台稳定
● 姿态参考系统
● 制导和控制系统
● 无人飞行器(UAV)还有,微型飞行器
● 汽车测试
● 汽车仪表
● 清洁机器人
简介
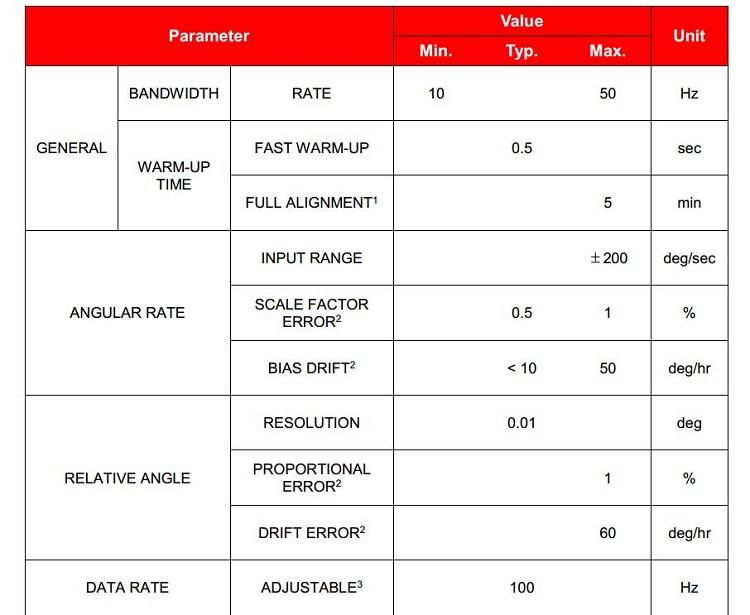
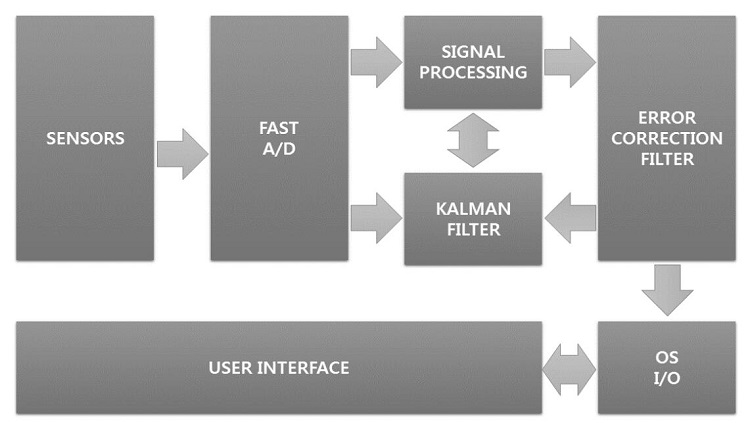
Cruizcore®r1071tT是在动态条件下用于测量角速度、航向角(也称为取向或偏航)的数字陀螺仪模组。这是一个高度紧凑,轻巧,完全自足的设备。在R1071T内部包含MEMS陀螺仪、内部电压调节器、信号处理电路、AD转换器和一个RISC微处理器以及我们专利的纠错算法。R1071T使用自适应降阶卡尔曼滤波器来减少影响这种传感器的误差(即偏置漂移,规模因子、不对称),因此它能输出非常精确稳定的角速度和航向角。启动时间小于1秒,用于计算偏置参数,并且此后不需要进一步校准。R1071T是导航应用最好的单轴速率测量解决方案。
规格参数
算法结构
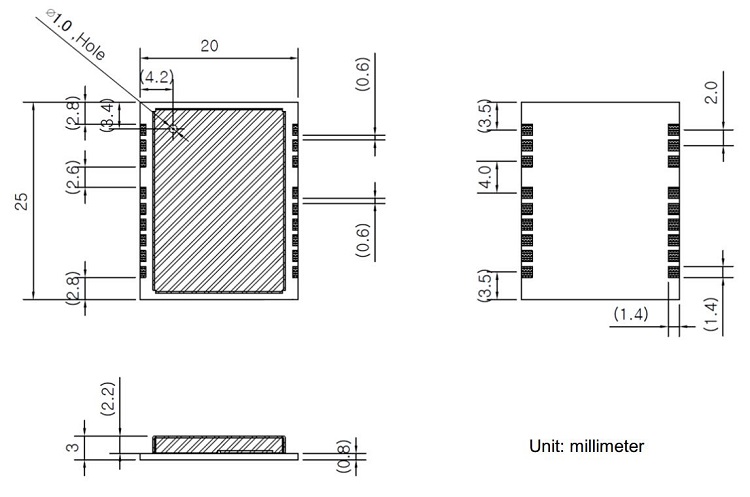
物理尺寸
产品替代
找到 个替代产品
声明:本产品内容及配图源自互联网收集或平台用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容真实性,不承担此类作品侵权行为的直接责任及连带责任。如涉及作品内容、版权等问题,请联系本网处理,侵权内容将在一周内下架整改。
