随着我们进入物联网时代,可穿戴电子设备在健康监测、人工智能(AI)和人机交互方面受到广泛关注。作为可穿戴设备获取外部信息的核心部件,构建和开发具有多模态传感能力和较大工作范围的柔性传感器非常重要。但现阶段大部分研究的重点是提升柔性传感器的功能参数,例如:高灵敏度、大感应范围、低检测线、无干扰检测。但相关信息的反馈缺少直接性。
引入光、声音、视觉辅助可使柔性传感器监测的信息反馈的更加直接。数字和视觉双模态传感的交互设备的研究成为研究的热点,可以实现数字和视觉双通道传感。但这些交互设备往往需要复杂的制造程序将电极和变色部件进行结合,甚至引入外部电源,不利于可穿戴设备的高度集成和大规模制造。
章鱼等头足类动物可以通过肌肉的松弛和收缩运动来操纵色素囊的暴露区域,并在遭受外部机械刺激的同时切换皮肤荧光或颜色以进行捕食和隐藏。这种机械发光概念已被应用于交互式智能电子产品的开发中,即通过在交互设备引入应变微裂纹结构实现颜色/亮度的切换。但是其通常会存在灵敏度低、传感范围受限,可视化不明显等问题。合理选择先进材料以及仿生结构对建设高质量的视觉/数字双重感知机械刺激的人机交互平台十分重要。
构建大感应范围、高灵敏度和视觉反馈等功能特征的双模态应变传感平台需要对不同功能材料进行合理的集成设计。济南大学赵松方/曹笃霞团队、福州大学赖跃坤团队和韩国延世大学Jong-Hyun Ahn院士团队受头足类皮肤机械发光机制和蜘蛛裂缝器官敏感性增强机制的启发,在可拉伸聚-苯乙烯-嵌段-丁二烯-嵌段-苯乙烯/荧光分子复合材料上实现吡咯原位聚合和碳纳米管沉积,开发了一种仿生可拉伸交互平台,表现出优异的性能,表现为高灵敏度系数(GF = 2.64 × 10⁴)、宽感应范围 (~270%)、快速响应/恢复时间 (~155 ms / 195 ms)、出色的稳定性(40% 应变下 ~15,000 次循环)和敏感的机械发光特性。该仿生可拉伸交互平台将应变传感数据和视觉图形显示进行融合,可实现监测人类运动和信息双重加密等重要应用,为开发用于人工智能、信息安全和隐私保护的可伸缩交互式系统扩宽了道路。
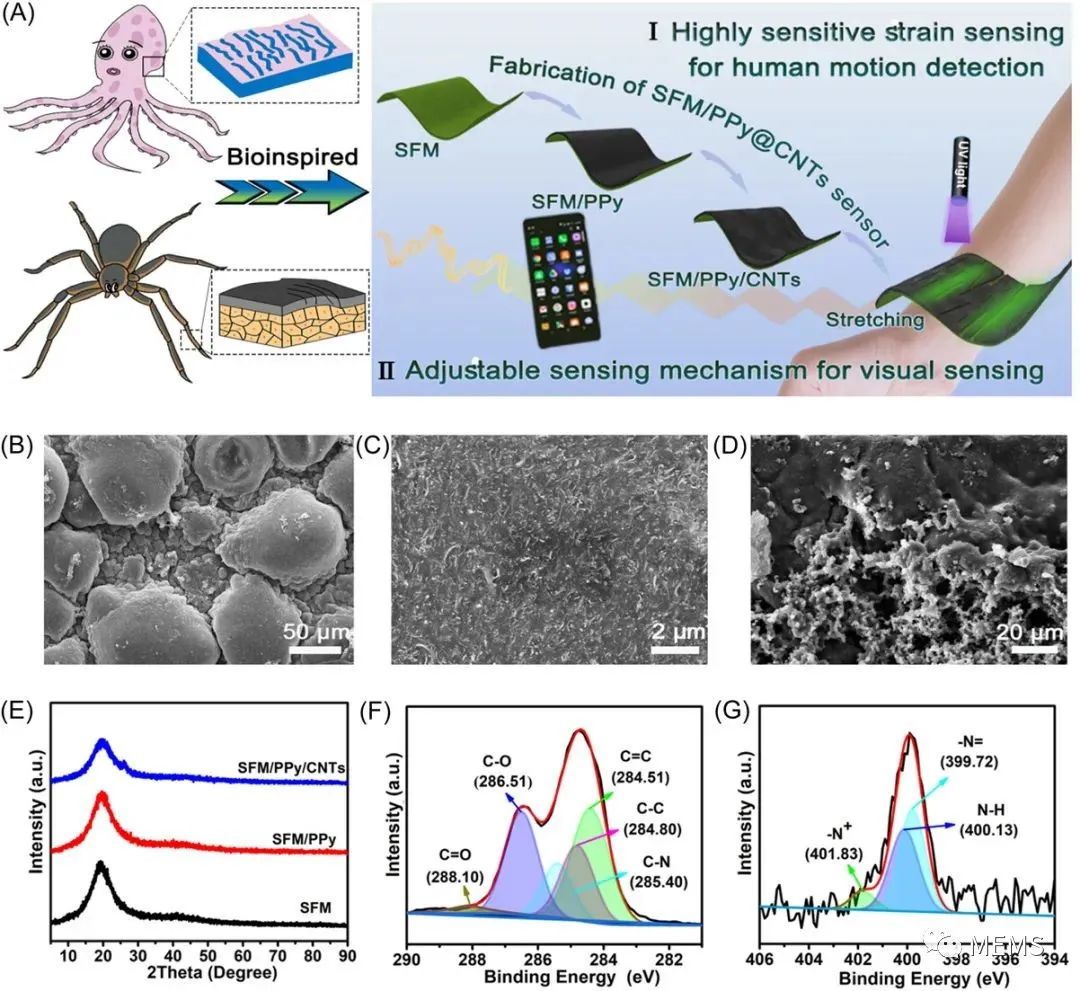
具有应变相关微裂纹的可拉伸交互平台 (SIP) 的结构/材料选择和表征
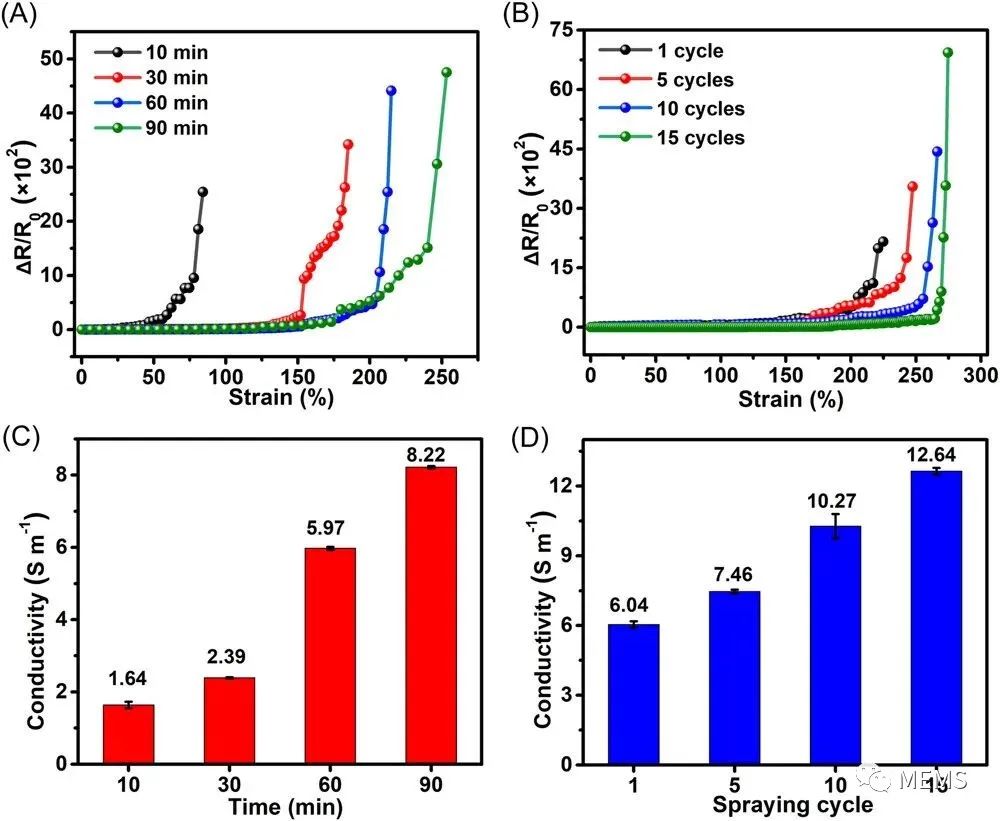
不同因素对复合材料相对电阻变化和电导率的影响
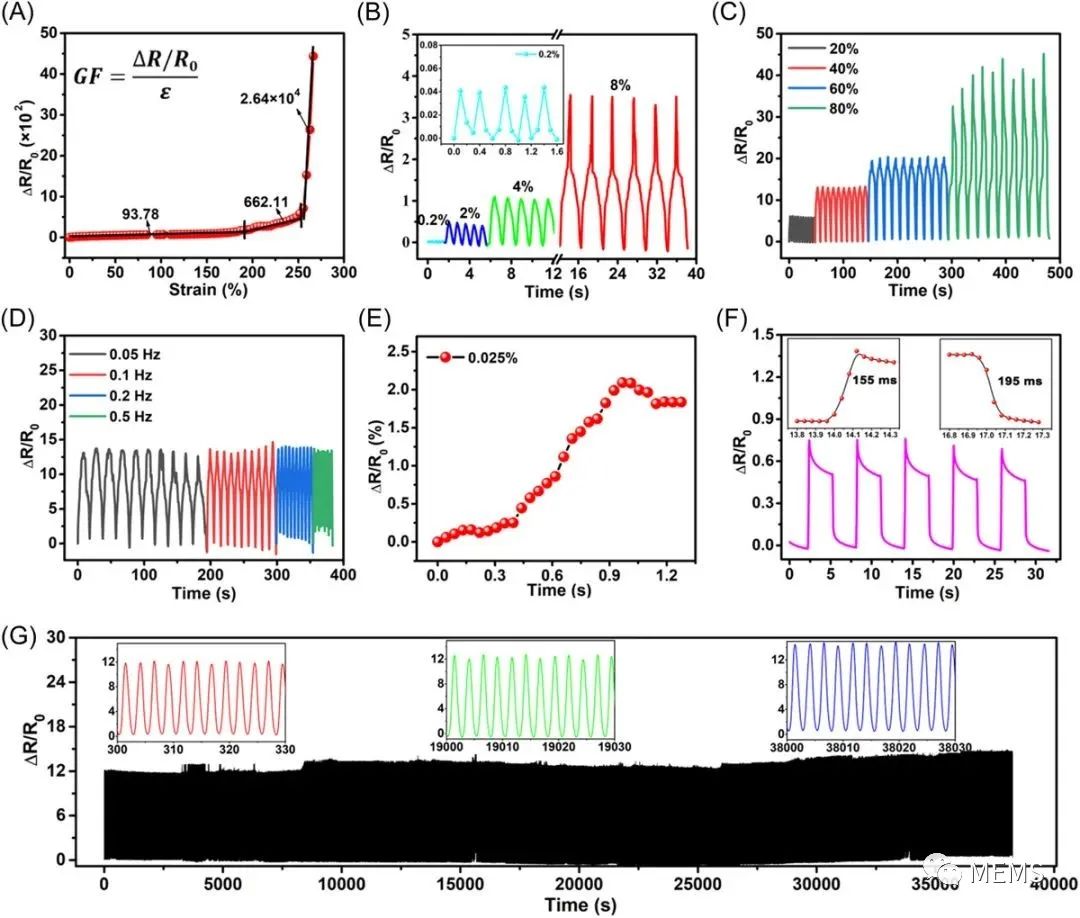
可拉伸交互平台(SIP)的机电性能
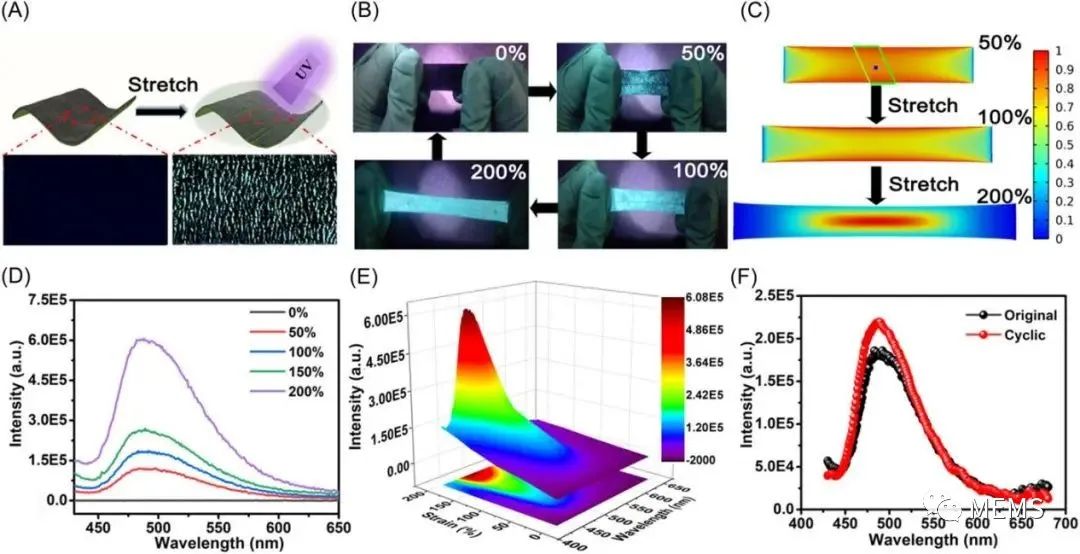
优化的可拉伸交互平台(SIP)机械发光传感性能
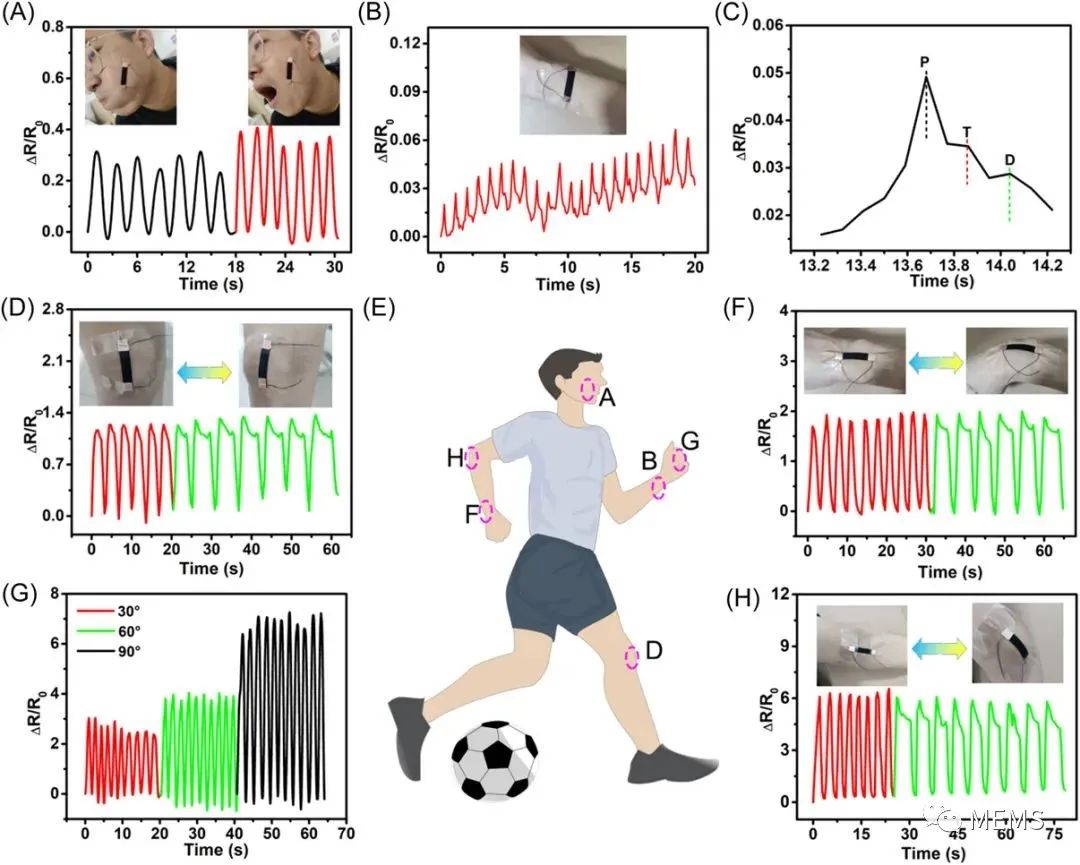
可伸缩交互平台在人体生理运动检测中的应用
审核编辑:彭菁