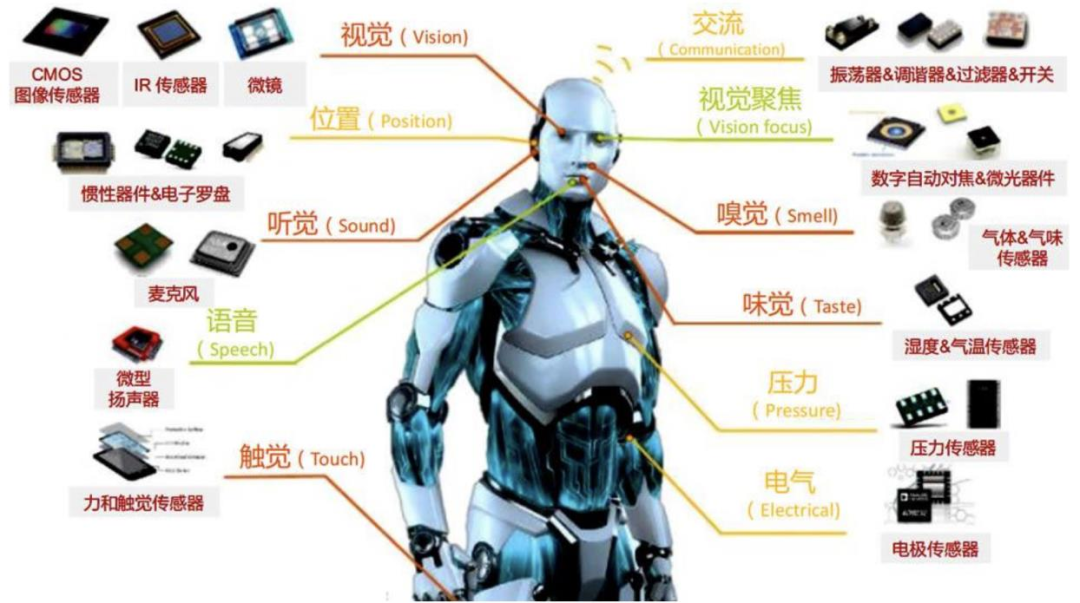
随着科技人形的快速发展机器人正逐渐从科幻电影走向现实生活,成为未来智能社会的重要组成部分。它们不仅可以执行复杂的任务,还可以与人类自然互动,这与先进的任务是分不开的传感器技术。在人形机器人的感知系统中,视觉传感器、力/扭矩传感器、触觉传感器和惯性测量单元(IMU)它扮演着至关重要的角色。本文将深入探讨这四种传感器工作原理、应用场景及其对人形机器人发展的影响。
视觉传感器:机器人的眼睛
视觉传感器是人形机器人感知外部环境的重要窗口。传统图像传感器不同的是基于事件的视觉传感器(EVS)模拟根据人类视神经的工作原理,可以实时监测高速移动的物体,只捕捉亮度变化的部分,大大提高了处理速度和效率。该传感器在射击游戏等复杂的动态环境中表现良好自动驾驶其他领域。对于人形机器人,视觉传感器不仅用于环境感知和导航,还可以实现物体识别、人脸识别等功能,为机器人提供更丰富的服务信息输入。
力/力矩传感器:机器人的“触觉神经”
力/力矩传感器是人形机器人关节感知和测量力的关键部件。它们能准确测量物体在三个方向上的力和扭矩,感受物体的重量、压力和摩擦力。六维力传感器可以同时测量三个方向的力和三个方向的扭矩,为机器人提供全方位的力感信息。在人形机器人的操作中,力/力矩传感器是实现精细操作、保持平衡和避免损坏的关键。例如,传感器可以实时反馈物体的重量和形状,帮助机器人调整抓取强度和姿势。
触觉传感器:机器人的“皮肤”
触觉传感器是人形机器人感知外部接触的重要工具。它们可以模拟人类的触觉,感知外部压力、温度和其他物理量。新型柔软可伸缩电容类型传感器通过电容和电极之间的差异获得法向力和剪切力,具有很高的灵敏度和灵活性。该传感器可以覆盖机器人的全身,形成类似于人类皮肤的触觉感知层。在人形机器人的交互过程中,触觉传感器可以感知用户的触摸和强度,实现更自然、更人性化的交互体验。
IMU:机器人的“内耳”
惯性测量单元(IMU)它是人形机器人感知自身运动状态的重要组成部分。它通常由加速度计制成陀螺仪它由磁力计和其他传感器组成,可以实时测量机器人的加速度、角度和方向。IMU在机器人的姿态控制、导航和定位方面发挥着重要作用。人形机器人通过整合IMU和其他传感器的数据,可以更准确地感知自己的运动状态和环境变化,实现更稳定可靠的行走和操作。
总结
人形机器人的发展离不开先进的传感器技术。视觉传感器、力/扭矩传感器、触觉传感器和IMU共同构成了人形机器人的感知系统,为机器人提供了全面的环境感知和自身的状态监测能力。这些传感器不仅提高了机器人的操作精度和稳定性,而且为人体机器人与人之间的自然交互提供了可能性。随着传感器技术的不断进步和成本的降低,人形机器人将在更多领域发挥重要作用,为人类社会的智能发展做出贡献。在未来,我们期待着看到更智能、更灵活、更人性化的人形机器人,它们将成为我们生活中不可或缺的伙伴和助手。