
XELA Robotics分布式三轴力触觉传感器,为协作服务型机器人领域的企业创造了新的可能性。由于人口迅速老龄化,我们必须找到一种解决方案,以减少劳动力中的可用人数来维持我们的经济生产力。uSkin,这是一种高密度的三轴触觉传感器,采用薄,柔软,耐用的模组。这为机器人提供了类似人的触觉,从而使他们能够精确地抓握和操纵物体。XELA uSkin可以轻松集成到各种机器人手和夹具中。

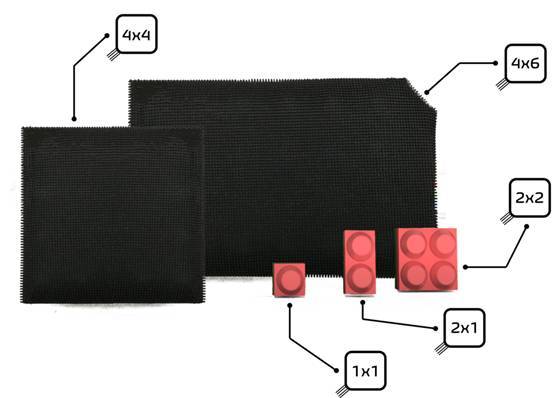
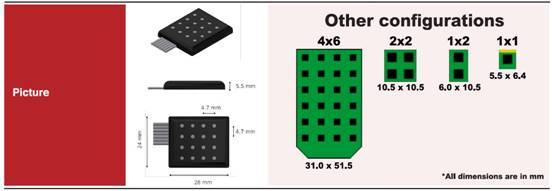
XELA的高密度三轴测量力传感器阵列,用于实现机器手和夹爪的触觉感知。XELA触觉感应阵列,具有小巧、轻薄、柔软、耐用,布线少等优点。uSkin传感器阵列具有1×1、2×1、2×2、4×4、4×6多种规格。
1、数字输出
提供数字输出,只需要几根细线,不需额外模数转换器。提供快、精确的测量,同时将电噪声和干扰降低。
2、柔软耐用
这是一种柔软传感器,能够处理易碎物体而不会损坏它们。不同尺寸、形状、硬度和重量的物体可以可靠地抓握和操作。柔软性还可确保传感器对过载具有高度的弹性,使其耐用。
3、易于集成
XELA提供触觉皮肤传感器,可轻松集成,以简单地粘附或连接方式进行安装。
应用场景与案例
服务机器人
食品药品抓取机器人
农业采摘机器人

声明:除原创内容及特别说明之外,推送稿件文字及图片均来自网络及各大主流媒体。版权归原作者所有。如认为内容侵权,请联系我们删除。